Voici un extrait de mon nouveau livre, "Incredible Stories From Space: A Be-the-Scenes Look at the Missions Changing Our View of the Cosmos", qui sortira demain, décembre. Le livre est un regard intérieur sur plusieurs actualités Missions robotiques de la NASA, et cet extrait est la partie 1 de 3 qui sera publiée ici sur Space Magazine, du chapitre 2, «Roving Mars with Curiosity». Le livre est disponible pour commande sur Amazon et Barnes & Noble.
Sept minutes de terreur
Il faut environ sept minutes à un vaisseau spatial de taille moyenne - comme un rover ou un atterrisseur robotique - pour descendre à travers l'atmosphère de Mars et atteindre la surface de la planète. Pendant ces courtes minutes, le vaisseau spatial doit décélérer à partir de sa vitesse flamboyante entrante d'environ 13 000 mph (20 900 km / h) pour atterrir à seulement 2 mph (3 km / h) ou moins.
Cela nécessite une série d'événements de type Rube Goldberg pour se dérouler dans un ordre parfait, avec une chorégraphie et un timing précis. Et tout cela doit se produire automatiquement via un ordinateur, sans aucune entrée de personne sur Terre. Il n'y a aucun moyen de guider le vaisseau spatial à distance de notre planète, à environ 250 millions de kilomètres. À cette distance, le temps de retard du signal radio de la Terre à Mars prend plus de 13 minutes. Par conséquent, au moment où la descente de sept minutes est terminée, tous ces événements se sont produits - ou ne se sont pas produits - et personne sur Terre ne sait lequel. Soit votre vaisseau spatial se trouve magnifiquement à la surface de Mars, soit il se trouve dans un tas écrasé.

C’est pourquoi les scientifiques et les ingénieurs des missions sur Mars l’appellent «Sept minutes de terreur».
Et avec la mission Mars Science Laboratory (MSL), qui a été lancée depuis la Terre en novembre 2011, la peur et l'inquiétude suscitées par ce qui est officiellement appelé «Entrée, descente et atterrissage» (EDL) ont augmenté de façon exponentielle. MSL comprend un rover à 6 roues de 1 tonne (900 kg) nommé Curiosity, et ce rover allait utiliser un tout nouveau système d'atterrissage non testé.
À ce jour, tous les atterrisseurs et rovers martiens ont utilisé - dans l'ordre - une entrée guidée par fusée, un bouclier thermique pour protéger et ralentir le véhicule, puis un parachute, puis des propulseurs pour ralentir encore plus le véhicule. La curiosité utiliserait également cette séquence. Cependant, un dernier élément crucial englobait l'un des dispositifs d'atterrissage les plus complexes jamais volés.

Surnommée la "Sky Crane", une scène de fusée en vol stationnaire abaisserait le rover sur des câbles de 66 pieds (20 mètres) de corde Vectran comme un alpiniste en rappel, le rover atterrissant en douceur directement sur ses roues. Tout cela devait être terminé en quelques secondes, et lorsque l'ordinateur de bord détectait le toucher, la pyrotechnie rompait les cordes et l'étape de descente en vol stationnaire s'éloignait à plein régime pour atterrir accidentellement loin de Curiosity.
Pour compliquer encore les choses, ce rover allait tenter l'atterrissage hors du monde le plus précis de tous les temps, s'installant à l'intérieur d'un cratère à côté d'une montagne à la hauteur du mont Rainier.
Une grande partie de l'incertitude était que les ingénieurs ne pouvaient jamais tester l'ensemble du système d'atterrissage en séquence. Et rien ne pouvait simuler les conditions atmosphériques brutales et la gravité plus légère présentes sur Mars, sauf sur Mars lui-même. Étant donné que le véritable atterrissage serait la première fois que la Sky Crane complète serait utilisée, des questions se posaient: que se passerait-il si les câbles ne se séparaient pas? Et si l'étape de descente continuait à descendre juste au-dessus du rover?
Si la Sky Crane ne fonctionnait pas, ce serait un jeu pour une mission qui avait déjà tant surmonté: problèmes techniques, retards, dépassements de coûts et la colère des critiques qui ont déclaré que ce rover Mars de 2,5 milliards de dollars saignait de l'argent le reste du programme d'exploration planétaire de la NASA.

Missions sur Mars
Avec sa lueur rouge dans le ciel nocturne, Mars attire les observateurs du ciel depuis des siècles. En tant que planète la plus proche de la Terre qui offre un potentiel pour de futures missions humaines ou la colonisation, elle a été d'un grand intérêt à l'ère de l'exploration spatiale. À ce jour, plus de 40 missions robotiques ont été lancées sur la planète rouge… ou plus précisément, plus de 40 missions ont été tenté.
Y compris tous les efforts américains, européens, soviétiques / russes et japonais, plus de la moitié des missions sur Mars ont échoué, soit en raison d'une catastrophe de lancement, d'un dysfonctionnement en route vers Mars, d'une tentative bâclée de se mettre en orbite, ou d'un atterrissage catastrophique. Alors que les missions récentes ont eu plus de succès que nos premières tentatives pionnières d'explorer Mars in situ (sur place), les scientifiques et ingénieurs spatiaux ne plaisantent que partiellement lorsqu'ils parlent de choses comme une `` grande goule galactique '' ou la `` malédiction de Mars '' missions.

Mais il y a eu aussi de merveilleux succès. Les premières missions dans les années 1960 et 70, telles que les orbites Mariner et les atterrisseurs Viking, nous ont montré un monde d'une beauté saisissante, bien que stérile et rocheux, anéantissant ainsi tout espoir de «petits hommes verts» en tant que voisins planétaires. Mais les missions ultérieures ont révélé une dichotomie: une magnifique désolation combinée à des allusions alléchantes de l'eau passée - ou peut-être même actuelle - et de l'activité mondiale.
Aujourd'hui, la surface de Mars est froide et sèche, et son atmosphère très mince ne protège pas la planète du bombardement des radiations du Soleil. Mais les indications sont que les conditions sur Mars ne sont pas toujours ainsi. On voit de l'orbite des canaux et des systèmes de vallées complexes qui semblent avoir été creusés par l'eau qui coule.
Pendant des décennies, les scientifiques planétaires ont débattu pour savoir si ces caractéristiques se sont formées pendant de brèves périodes humides causées par des événements cataclysmiques tels qu'une frappe massive d'astéroïdes ou une catastrophe climatique soudaine, ou si elles se sont formées sur des millions d'années lorsque Mars a pu être continuellement chaud et humide. Jusqu'à présent, la plupart des preuves sont ambiguës; ces caractéristiques auraient pu se former de toute façon. Mais il y a des milliards d'années, s'il y avait des rivières et des océans, tout comme sur Terre, la vie aurait pu s'installer.

The Rovers
Le rover Curiosity est le quatrième vaisseau spatial mobile que la NASA a envoyé à la surface de Mars. Le premier était un rover de 23 livres (10,6 kg) nommé Sojourner qui a atterri dans une plaine martienne couverte de roches le 4 juillet 1997. À propos de la taille d'un four à micro-ondes, le Sojourner de 2 pieds (65 cm) de long n'a jamais traversé à plus de 40 pieds de son atterrisseur et de sa station de base. Le rover et l'atterrisseur constituent ensemble la mission Pathfinder, qui devrait durer environ une semaine. Au lieu de cela, cela a duré près de trois mois et le duo a renvoyé 2,6 gigabits de données, capturant plus de 16500 images de l'atterrisseur et 550 images du rover, ainsi que la prise de mesures chimiques des roches et du sol et l'étude de l'atmosphère et du temps de Mars. Il a identifié des traces d'un passé plus chaud et plus humide pour Mars.

La mission a eu lieu alors qu'Internet ne faisait que gagner en popularité, et la NASA a décidé de publier des photos du rover en ligne dès qu'elles ont été transmises à la Terre. Cela a fini par être l'un des plus grands événements de l'histoire du jeune Internet, le site Web de la NASA (et les sites miroirs mis en place pour la forte demande) ayant reçu plus de 430 millions de visites dans les 20 premiers jours après l'atterrissage.
Pathfinder a également utilisé un système d'atterrissage inhabituel. Au lieu d'utiliser des propulseurs pour toucher la surface, les ingénieurs ont concocté un système de coussins gonflables géants pour entourer et protéger le vaisseau spatial. Après avoir utilisé le système conventionnel d'une entrée guidée par fusée, d'un bouclier thermique, de parachutes et de propulseurs, les airbags se sont gonflés et l'atterrisseur cocooned a été largué à 100 pieds (30 m) au-dessus du sol. Rebondissant plusieurs fois sur la surface de Mars comme un ballon de plage géant, Pathfinder s'est finalement arrêté, les airbags se sont dégonflés et l'atterrisseur s'est ouvert pour permettre au rover d'émerger.
Bien que cela puisse sembler une stratégie d'atterrissage folle, cela a si bien fonctionné que la NASA a décidé d'utiliser des versions plus grandes des airbags pour la prochaine mission de rover: deux rovers identiques nommés Spirit et Opportunity. Les Mars Exploration Rovers (MER) ont à peu près la taille d'une tondeuse à gazon, à 5,2 pieds (1,6 mètres) de long, pesant environ 400 livres (185 kilogrammes). Spirit a atterri avec succès près de l’équateur de Mars le 4 janvier 2004 et trois semaines plus tard, Opportunity a rebondi de l’autre côté de la planète. Le but de MER était de trouver des preuves de l'eau passée sur Mars, et les deux rovers ont touché le jackpot. Parmi de nombreuses découvertes, Opportunity a découvert d'anciens affleurements rocheux qui se sont formés dans l'eau courante et Spirit a trouvé des roches de silice inhabituelles en forme de chou-fleur que les scientifiques étudient toujours, mais elles peuvent fournir des indices sur la vie martienne ancienne potentielle.

Incroyablement, à l'heure où nous écrivons (2016), le rover Opportunity fonctionne toujours, conduisant plus d'un marathon (26 miles / 42 km) et il continue d'explorer Mars dans un grand cratère nommé Endeavour. Spirit, cependant, a succombé à une perte de puissance pendant l'hiver froid martien en 2010 après s'être coincé dans un bac à sable. Les deux rovers ont de loin survécu à leur durée de vie prévue de 90 jours.
D'une manière ou d'une autre, les rovers ont chacun développé une «personnalité» distincte - ou, peut-être une meilleure façon de l'exprimer est que les gens attribué personnalités aux robots. Spirit était un enfant à problèmes et une reine du drame, mais devait lutter pour chaque découverte; Opportunity, une sœur cadette privilégiée et une vedette, car les nouvelles découvertes semblaient lui venir facilement. L'esprit et les opportunités n'étaient pas conçus pour être adorables, mais les charmants rovers ont capturé l'imagination des enfants et des vétérans de l'espace chevronnés. Le chef de projet MER, John Callas, a appelé les rovers jumeaux «les choses les plus mignonnes du système solaire». Alors que les rovers courageux et de longue durée surmontaient les dangers et les périls, ils envoyaient des cartes postales de Mars tous les jours. Et les terriens les aimaient pour ça.
Curiosité
Bien que cela figure depuis longtemps sur notre liste de tâches spatiales, nous n'avons pas encore tout à fait compris comment envoyer des humains sur Mars. Nous avons besoin de fusées et d'engins spatiaux plus gros et plus avancés, d'une meilleure technologie pour des choses comme le maintien de la vie et la culture de notre propre nourriture, et nous n'avons vraiment pas la capacité de débarquer les très grandes charges utiles nécessaires pour créer un établissement humain sur Mars.
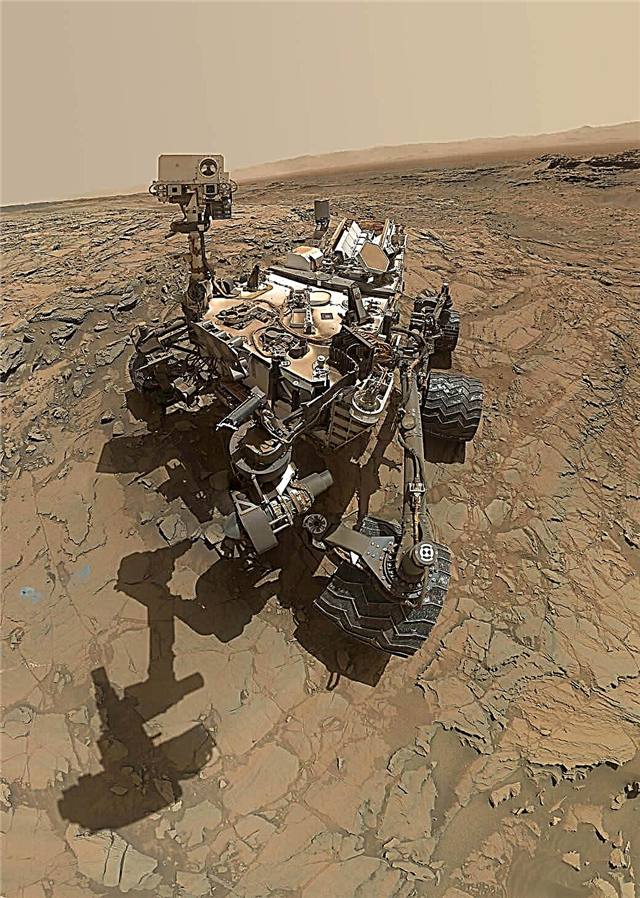
Mais en attendant - alors que nous essayons de comprendre tout cela - nous avons envoyé l'équivalent robotique d'un géologue humain sur la planète rouge. Le rover Curiosity de la taille d'une voiture est armé d'un ensemble de dix-sept caméras, d'une perceuse, d'un scoop, d'un objectif à main et même d'un laser. Ces outils ressemblent à l'équipement que les géologues utilisent pour étudier les roches et les minéraux sur Terre. De plus, ce rover imite l'activité humaine en escalade en montagne, en mangeant (au sens figuré), en fléchissant son bras (robotique) et en prenant des selfies.

Ce géologue robotique itinérant est également un laboratoire de chimie mobile. Un total de dix instruments sur le rover aident à rechercher du carbone organique qui pourrait indiquer la matière première nécessaire à la vie, et «reniflent» l'air martien, essayant de sentir si des gaz comme le méthane - qui pourraient être un signe de vie - sont présents. Le bras robotique de Curiosity porte un couteau de gadgets de l'armée suisse: une caméra loupe, un spectromètre pour mesurer les éléments chimiques et un foret pour percer à l'intérieur des roches et alimenter les laboratoires SAM (Sample Analysis at Mars) et) et CheMin (Chimie et minéralogie). Le laser ChemCam peut vaporiser la roche jusqu'à une distance de 7 mètres (23 pieds) et identifier les minéraux du spectre de lumière émis par la roche dynamitée. Une station météo et un moniteur de rayonnement complètent les appareils à bord.
Avec ces caméras et instruments, le rover devient les yeux et les mains d'une équipe internationale d'environ 500 scientifiques liés à la terre.
Alors que les précédents rovers de Mars utilisaient des panneaux solaires pour recueillir la lumière du soleil pour l'énergie, Curiosity utilise un RTG comme New Horizons. L'électricité générée par le RTG alimente à plusieurs reprises les batteries rechargeables lithium-ion, et la chaleur du RTG est également acheminée dans le châssis du rover pour garder l'électronique intérieure au chaud.
Avec la taille et le poids de Curiosity, le système d'atterrissage d'airbag utilisé par les rovers précédents était hors de question. Comme l'explique Rob Manning, ingénieur de la NASA, "vous ne pouvez pas faire rebondir quelque chose d'aussi gros." La Sky Crane est une solution audacieuse.
La mission de Curiosity: comprendre comment Mars a évolué au cours de milliards d'années et déterminer si elle était - ou même maintenant - capable de soutenir la vie microbienne.
Cible de Curiosity pour l'exploration: une montagne montagnarde de 5,5 kilomètres (3,4 miles) de haut appelle le mont. Sharp (officiellement appelé Aeolis Mons) qui se trouve au milieu du cratère Gale, un bassin d'impact de 96 miles (155 km) de diamètre.
Gale a été choisi parmi 60 sites candidats. Les données d'un vaisseau spatial en orbite ont déterminé que la montagne a des dizaines de couches de roche sédimentaire, peut-être construites sur des millions d'années. Ces couches pourraient raconter l’histoire géologique et climatique de Mars. De plus, la montagne et le cratère semblent avoir des canaux et d'autres caractéristiques qui semblent avoir été sculptés par l'eau qui coule.
Le plan: MSL atterrirait dans une partie inférieure et plus plate du cratère et se dirigerait soigneusement vers le haut vers la montagne, étudiant chaque couche, faisant essentiellement un tour des époques de l'histoire géologique de Mars.
La partie la plus difficile serait d'y arriver. Et l'équipe MSL n'a eu qu'une seule chance de bien faire les choses.
Nuit d'atterrissage
L'atterrissage de Curiosity le 5 août 2012 a été l'un des événements d'exploration spatiale les plus attendus de l'histoire récente. Des millions de personnes ont regardé les événements se dérouler en ligne et à la télévision, avec des flux de médias sociaux bourdonnant de mises à jour. Le flux de la télévision de la NASA provenant du contrôle de mission du JPL a été diffusé en direct sur les écrans de Time Square à New York et dans des lieux du monde entier accueillant des «débarquements».
Mais l'épicentre de l'action était au JPL, où des centaines d'ingénieurs, de scientifiques et de responsables de la NASA se sont réunis au Space Operations Operations du JPL. L'équipe EDL - portant tous des polos bleu clair assortis - surveillait les consoles informatiques au contrôle de mission.
Deux membres de l'équipe se sont démarqués: le chef de l'équipe EDL, Adam Steltzner - qui porte ses cheveux dans un pompadour semblable à Elvis - a fait des allers-retours entre les rangées de consoles. Le directeur de vol Bobak Ferdowski arborait un Mohawk aux étoiles et rayures raffiné. De toute évidence, au XXIe siècle, les coiffures exotiques ont remplacé les lunettes noires et les protège-poches des années 60 pour les ingénieurs de la NASA.

Au moment de l'atterrissage, Ashwin Vasavada était l'un des scientifiques les plus anciens de l'équipe de mission, ayant rejoint MSL en tant que scientifique adjoint du projet en 2004 lorsque le rover était en construction. À l'époque, une grande partie du travail de Vasavada consistait à travailler avec les équipes d'instruments pour finaliser les objectifs de leurs instruments et superviser les équipes techniques pour aider à développer les instruments et à les intégrer au rover.
Chacun des dix instruments sélectionnés a amené une équipe de scientifiques, donc avec des ingénieurs, du personnel supplémentaire et des étudiants, il y avait des centaines de personnes qui préparaient le rover pour le lancement. Vasavada a aidé à coordonner toutes les décisions et modifications qui pourraient affecter la science éventuelle réalisée sur Mars. Pendant l'atterrissage, cependant, tout ce qu'il pouvait faire était de regarder.
"J'étais dans la pièce à côté de la salle de contrôle qui était diffusée à la télévision", a déclaré Vasavada. «Pour l'atterrissage, je ne pouvais rien faire à part réaliser les huit dernières années de ma vie et tout mon avenir était basé sur ces sept minutes d'EDL.»
De plus, le fait que personne ne connaîtrait le véritable sort du rover jusqu'à 13 minutes après le fait en raison du retard radio a conduit à un sentiment d'impuissance pour tout le monde au JPL.
"Bien que j'étais assis sur une chaise", a ajouté Vasavada, "je pense que j'étais mentalement recroquevillé en position fœtale."
Alors que Curiosity se rapprochait de Mars, trois autres vaisseaux spatiaux vétérans en orbite autour de la planète se sont mis en position pour pouvoir garder un œil sur le nouveau venu MSL alors qu'il transmettait des informations sur son statut. Au début, MSL communiquait directement avec les antennes du réseau spatial profond (DSN) sur Terre.
Pour rendre la télémétrie du vaisseau spatial aussi rationalisée que possible pendant l'EDL, Curiosity a envoyé 128 tonalités simples mais distinctes indiquant quand les étapes du processus d'atterrissage ont été activées. Allen Chen, un ingénieur de la salle de contrôle, a annoncé chacun d'eux à mesure qu'ils arrivaient: un son indiquait que le vaisseau spatial était entré dans l'atmosphère de Mars; un autre a signalé les propulseurs tirés, guidant le vaisseau spatial vers Gale Crater. Des applaudissements et des sourires provisoires sont venus de l'équipe de Mission Control dès les premiers tons, les émotions augmentant à mesure que le vaisseau spatial se rapprochait de plus en plus de la surface.
À mi-chemin de la descente, MSL est passé sous l'horizon martien, le mettant hors de communication avec la Terre. Mais les trois orbiteurs - Mars Odyssey, Mars Reconnaissance Orbiter et Mars Express - étaient prêts à capturer, enregistrer et relayer les données vers le DSN.

De manière transparente, les tonalités continuaient à venir sur Terre alors que chaque étape de l'atterrissage se poursuivait parfaitement. Le parachute s'est déployé. Le bouclier thermique s'est détaché. Un signal sonore a signalé l'étape de descente, le rover lâchant le parachute, un autre vol et une descente motorisés indiqués vers la surface. Un autre ton signifiait que la Sky Crane avait commencé à abaisser le rover à la surface.
Un ton est arrivé, indiquant que les roues de Curiosity ont touché la surface, mais même cela ne signifiait pas le succès. L'équipe devait s'assurer que la manœuvre de fuite du Sky Crane fonctionnait.
Puis vint le ton qu'ils attendaient: «Touchdown confirmé», a applaudi Chen. "Nous sommes en sécurité sur Mars!"
Le pandémonium et la joie ont éclaté dans le contrôle de mission du JPL, sur les sites des réceptions et sur les réseaux sociaux. Il semblait que le monde fêtait ensemble à ce moment-là. Dépassements de coûts, retards, toutes les choses négatives jamais dites sur la mission MSL semblaient disparaître avec le triomphe de l'atterrissage.
"Bienvenue sur Mars!" le directeur du Jet Propulsion Laboratory, Charles Elachi, a déclaré lors d'une conférence de presse après le touché spectaculaire: «Ce soir, nous avons atterri, demain nous commençons à explorer Mars. Notre curiosité n'a pas de limites. "

"Les sept minutes se sont en fait déroulées très vite", a déclaré Vasavada. «C'était fini avant de le savoir. Ensuite, tout le monde sautillait de haut en bas, même si la plupart d'entre nous continuaient de traiter que cela s'était si bien passé. »
Le fait que l'atterrissage se soit si bien - voire parfaitement - a peut-être choqué une partie de l'équipe du JPL. Bien qu'ils aient répété l'atterrissage de Curiosity à plusieurs reprises, il est remarquable qu'ils n'aient jamais pu faire atterrir le véhicule dans leurs simulations.
"Nous avons essayé de le répéter très précisément", a déclaré Vasavada, "afin que tout soit synchronisé - à la fois la télémétrie que nous avions simulée qui proviendrait du vaisseau spatial, ainsi que des animations en temps réel qui avaient été créées. C'était une chose assez complexe, mais cela n'a jamais vraiment fonctionné. Donc, l'atterrissage réel et réel était la première fois que tout fonctionnait bien. »
La curiosité a été programmée pour prendre immédiatement des photos de son environnement. Dans les deux minutes qui ont suivi l'atterrissage, les premières images ont été transmises à la Terre et apparues sur les écrans de visualisation du JPL.
"Nous avions chronométré les orbiteurs pour survoler pendant l'atterrissage, mais nous ne savions pas avec certitude si leur liaison relais durerait assez longtemps pour obtenir les premières images", a déclaré Vasavada. «Ces premières photos étaient assez délabrées parce que les capots de protection étaient toujours sur les caméras et les propulseurs avaient poussé beaucoup de poussière sur les capots. Nous ne pouvions pas vraiment le voir très bien mais nous avons quand même sauté de haut en bas parce que c'étaient des photos de Mars. "
Étonnamment, l'une des premières images montrait exactement ce que le rover avait été envoyé pour étudier.
«Nous avions atterri avec les caméras face au Mont. Sharp », a déclaré Vasavada, secouant la tête. «Dans l'image HazCam (caméra de danger), juste entre les roues, nous avons eu ce magnifique cliché. Il y avait la montagne. C'était comme un aperçu de toute la mission, juste devant nous. »

Demain: Partie 2 de «Roving Mars With Curiosity», avec «Living on Mars Time» et «Discoveries»
«Incredible Stories From Space: A Be-the-Scenes Look at the Missions Changing Our View of the Cosmos» est publié par Page Street Publishing, une filiale de Macmillan.